品牌智虎
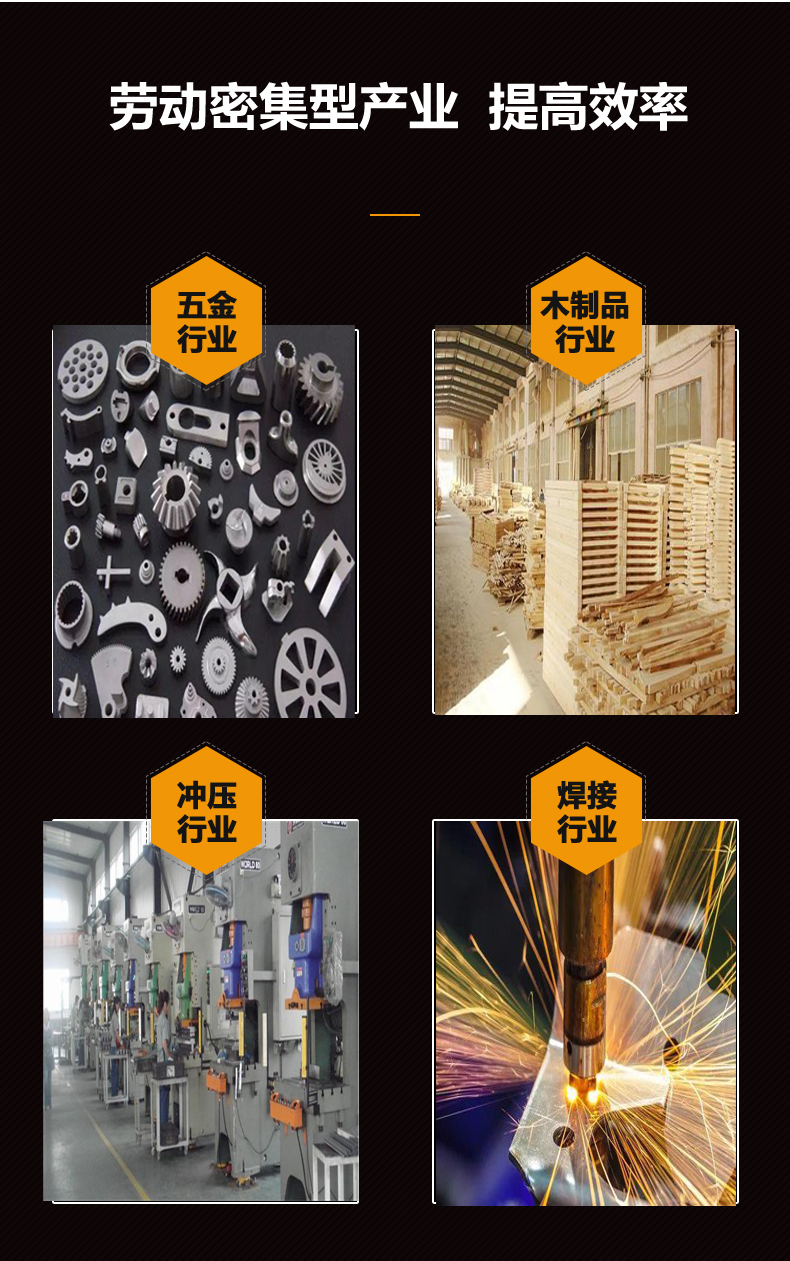
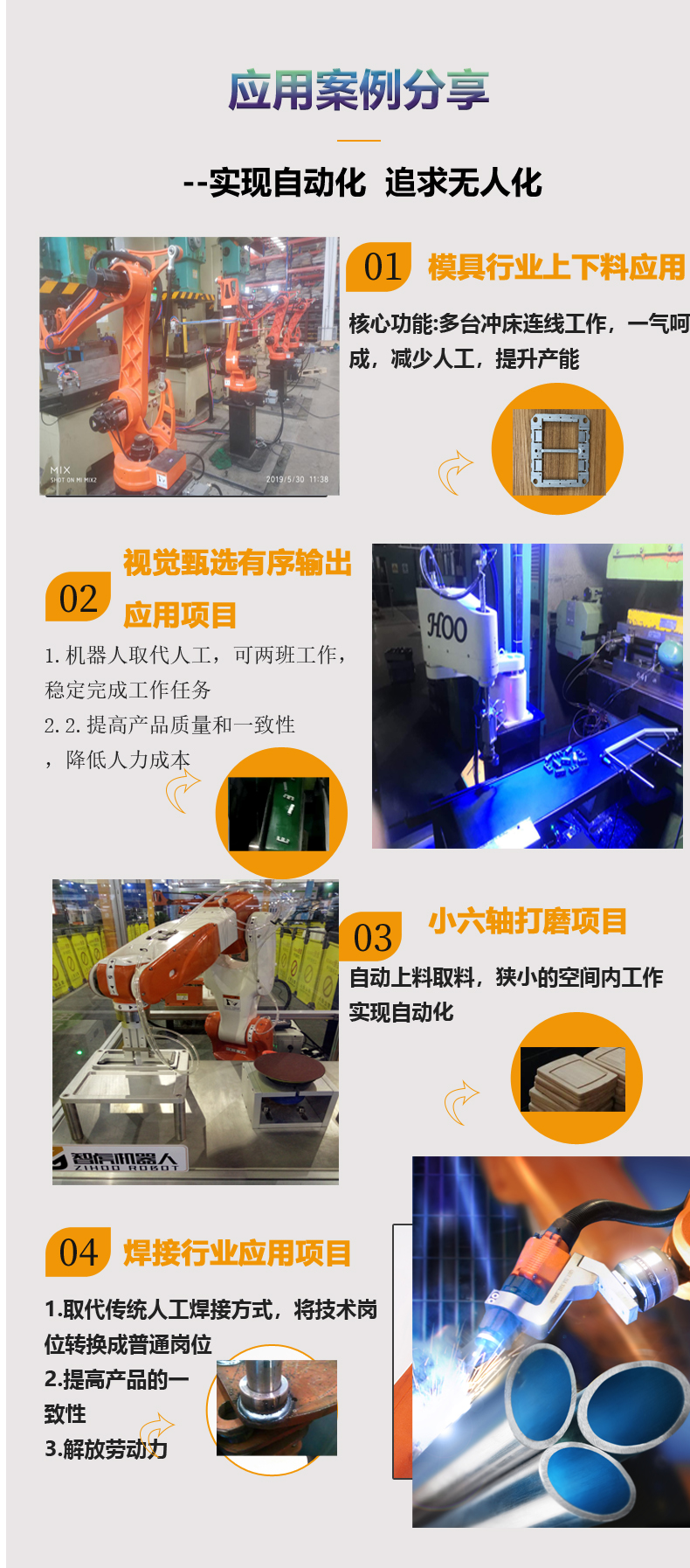
应用焊接、搬运、检测、注塑等
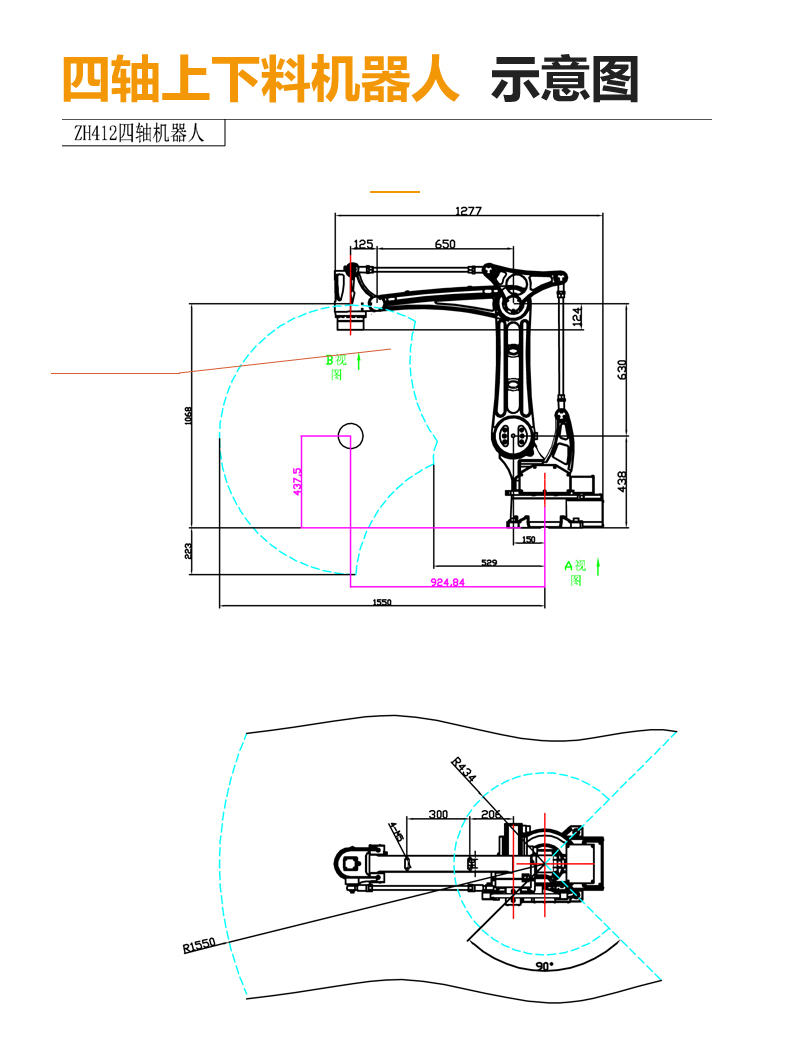
产品冲压机器人
臂展1800-3000mm
关节数量四轴/六轴
是否进口否
控制方式编程控制
可售卖地全国
工业冲压机器人是如何识别物体进行抓取任务的呢?
从机器视觉的角度,由简入繁从相机标定,平面物体检测、有纹理物体、无纹理物体、深度学习、与任务/运动规划结合等6个方面深度解析文章的标题。
首先,我们要了解,机器人领域的视觉跟计算机领域的视觉有一些不同:机器视觉的目的是给机器人提供操作物体的信息。所以,机器视觉的研究大概有这几块:
1. 物体识别:在图像中检测到物体类型等,这跟 CV 的研究有很大一部分交叉;
2. 位姿估计:计算出物体在摄像机坐标系下的位置和姿态,对于机器人而言,需要抓取东西,不仅要知道这是什么,也需要知道它具体在哪里;
3. 相机标定:因为上面做的只是计算了物体在相机坐标系下的坐标,我们还需要确定相机跟机器人的相对位置和姿态,这样才可以将物姿转换到机器人位姿。


如果您在我们这边有什么疑问的话可以随时来电咨询。
http://whkd66.cn.b2b168.com













